
Создание цифрового персонажа, который дышит, двигается и существует с убедительностью живого существа, остается одной из самых амбициозных и сложных задач в компьютерной графике. Если скелетная анимация решает вопрос, куда движется тело, то мышечная система отвечает на вопрос, как оно это делает — как кожа обтягивает и отражает работу скрытой под ней анатомии, как объем мышцы динамично меняется при усилии, как возникают и исчезают складки и напряжения.
Существует фундаментальный разрыв между биологической реальностью и её цифровой имитацией. Настоящая мышца — это не статичный геометрический объект, а сложная иерархическая система из волокон, фасций и сухожилий, подчиняющаяся законам биофизики. Она сокращается, взбухает в объеме, взаимодействует с соседними тканями и передает усилие. Классический риггинг, основанный на линейном скиннинге вершины к кости, по своей сути не способен воспроизвести эту сложность, рождая артефакты и эффект «резинового человека».
Ключевая проблема этого исследования — это поиск эффективных методов преодоления этого разрыва. Как с помощью инструментов 3D-графики — будь то готовые системы, комбинация деформеров или физические симуляции — создать иллюзию живой плоти, которая была бы одновременно:
— Визуально правдоподобной, следуя анатомической логике (что требует изучения биомеханики). — Контролируемой для художника или аниматора. — Производительной с точки зрения вычислительных ресурсов и времени.
Однако основой всех основ в разработке любой правдоподобной мышечной деформации вне зависимости от используемого в пайплайне метода является понимание самой анатомии и биомеханики живых тканей.
Биомеханика мышечного сокращения
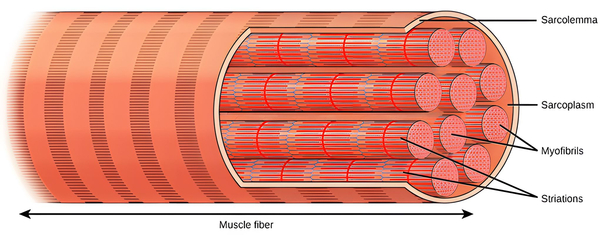
На уровне макроструктуры отдельная скелетная мышца — это орган, состоящий из тысяч мышечных волокон — миоцитов, связанных между собой соединительной тканью. Эти волокна образуют мышечную массу, которая переходит в сухожилия на обоих концах, прикрепляясь к костям. Соединительная ткань (эпимизий, перимизий, эндомизий) не только связывает волокна между собой, но и передает силу, выдерживает пассивное растяжение и способствует восстановлению формы мышцы после деформации.
На уровне микроструктуры каждое мышечное волокно по-отдельности представляет собой многоядерную клетку, содержащую миофибриллы — сократительные элементы. Миофибриллы состоят из повторяющихся единиц, называемых саркомерами, которые являются основными функциональными единицами сокращения.
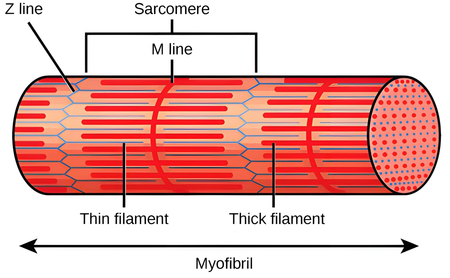
Строение миофибриллы и саркомера
Молекулярный механизм: теория скользящих нитей
Саркомер ограничен Z-дисками и содержит два типа белковых филаментов: толстые филаменты, состоящие из миозина, и тонкие филаменты, состоящие из актина. Сокращение мышц происходит в соответствии с теорией скользящих нитей: головки миозина на толстых филаментах связываются с активными участками на актиновых филаментах и в момент поступления импульса выполняют так называемый «силовой ход», который тянет актиновые филаменты к центру саркомера. За счёт этого саркомер укорачивается, пока длина самих филаментов не меняется — мышца сокращается, взбухая и визуально укорачиваясь. Когда нервный импульс прекращается, связь между актином и миозином ослабевает, и мышца возвращается к своей исходной форме под действием внешних сил (например, силы тяжести или сокращения мышцы-антагониста).
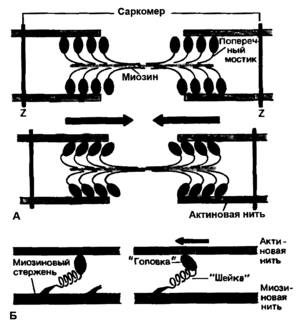
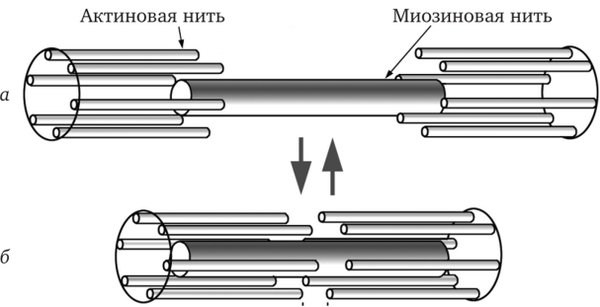
Схемы сокращения мышц. Теория скользящих нитей
Мышцы редко работают изолированно. Они функционируют в скоординированных группах, среди которых выделяются:
Агонисты — мышцы, в первую очередь ответственные за конкретное движение (например, двуглавая мышца плеча является агонистом сгибания локтя). Антагонисты — мышцы, которые воспроизводят противоположное движение (например, трехглавая мышца плеча является антагонистом двуглавой мышцы во время сгибания локтя). Синергисты — мышцы, которые помогают агонисту, либо участвуя в движении, либо стабилизируя соседние суставы (к примеру плечевая и плечелучевая мышцы являются синергистами для двуглавой и трёхглавой мышц плеча).
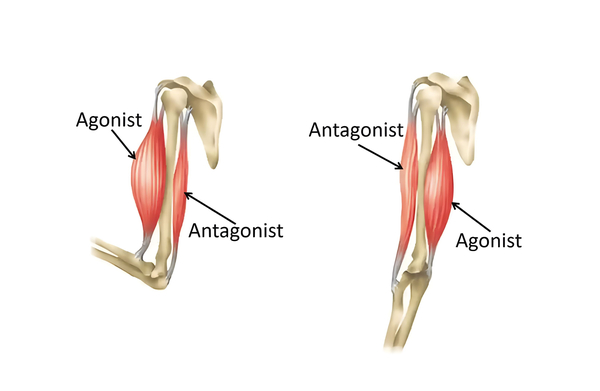
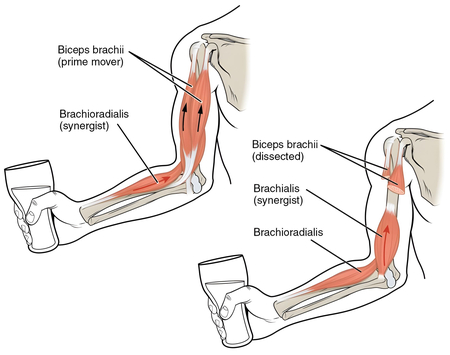
Работа мышц-агонистов, антагонистов и синергистов
Понимание этих нюансов биомеханики напрямую диктует логику построения мышечных систем в 3D:
- Динамическое изменение формы: Задача 3D-художника — не просто анимировать костяк, а создать систему, в которой геометрия мышц динамически меняет свой объем и форму в ответ на движение суставов, имитируя работу актина и миозина.
- Синхронизация работы агонистов и антагонистов: В 3D персонаже необходимо правильная настройка этих отношений агонистов и антагонистов имеет решающее значение для естественной деформации. Например, когда персонаж сгибает руку, моделируемый бицепс (агонист) должен сокращаться и увеличиваться, а трицепс (антагонист) должен расслабляться и удлиняться.
- Взаимодействие тканей: Мышцы сталкиваются и взаимодействуют друг с другом, «оборачиваясь» вокруг костей, взаимодействуют с фасциями, с жировой тканью, и за счет этого создаются сложные, плавные и реалистичными деформации кожи. Это объясняет, почему простого скиннинга (привязки кожи к костям) недостаточно, если требуется максимально близкий к фотореализму результат.



